

Model:STP-01RF
Packing speed:Max. 8 robot cycle/m(depend on product)
Power supply:3 phases,380V / 220V, 50/60HZ
Occupation:Depends on design
Target product:bottle,box,can,bag,book etc.
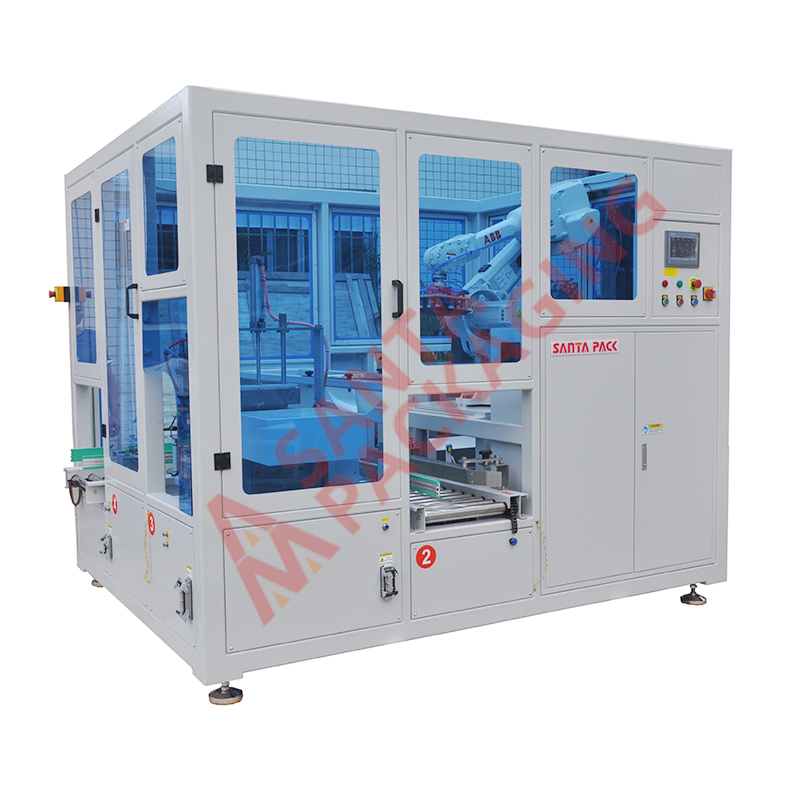
Description:robot case packer is an intelligent system which fit for pick and place bottles, jar, can or bag. This system have simple operation, easy gripper chan...
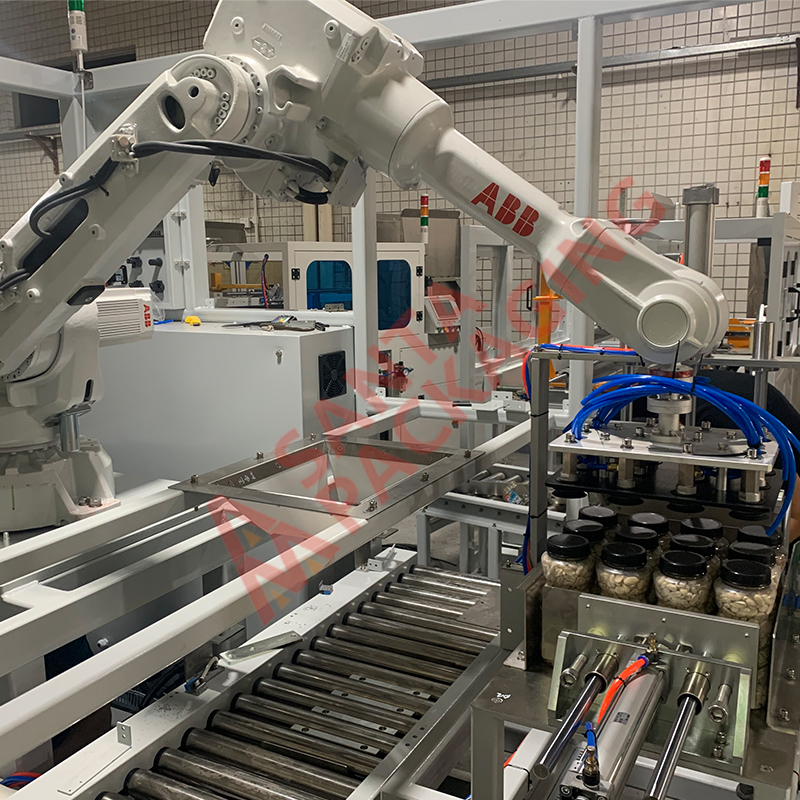
Box loading robot system is desgined for high accuracy and high speed loading condition. Based on Robot system, we can do pick and place for many products such as bottle, jar, can, bag,tank etc.
Robot system is so intelligent, that we can do a lot of change over regarding to different product shape or size. It is more flexible and stable for our customer.
Robot case packer can adopt vision system to identify and positoning the product high efficiently.
Robot system has very simple operation for the worker. Also has small occupation.
>Standard Robot brand: ABB.You can choose KUKA , or Chinese brand.
>Suitable for pick and place or palletizing.
>2 control system.1.Robot drving control system, 2. Packing line control system.
>Auto bag detect and control.
>HIMI panel & PLC,easy to learn and operate.
>Change product format by computer.You can save your own working format.
>Standard safety protection. Photo sensor safety door.
>Gripper special design for different picking product.
| Items | Specification |
| Packing speed | Max. 8 robot cycle/m(depend on product) |
| Packaging Product | Pouch, bottle, can, carton, jar, tank etc. |
| picking type | Suction cup, gripper, claw etc. |
| Machine size (L*W*H, unit: mm) | Depends on design |
| Voltage | 3 phases,380V / 220V, 50/60HZ |
| Power | 45KW |
| Air consumption | 6-8 kg/cm² |
E-mail: sales@santapacking.com
Mob/Whatsapp: +8615915741987
Add: 1 FL, Mapuao Industrial zone, Fenggang town, Dongguan,Guangdong, China


